5.4.9 Smart Box
Overview
The Smart Box App performs intelligent analysis after receiving IPC video stream input. The App consists of RTSP video stream, video decoding, human and face detection, image encoding, and a Web display client. The workflow is shown below:
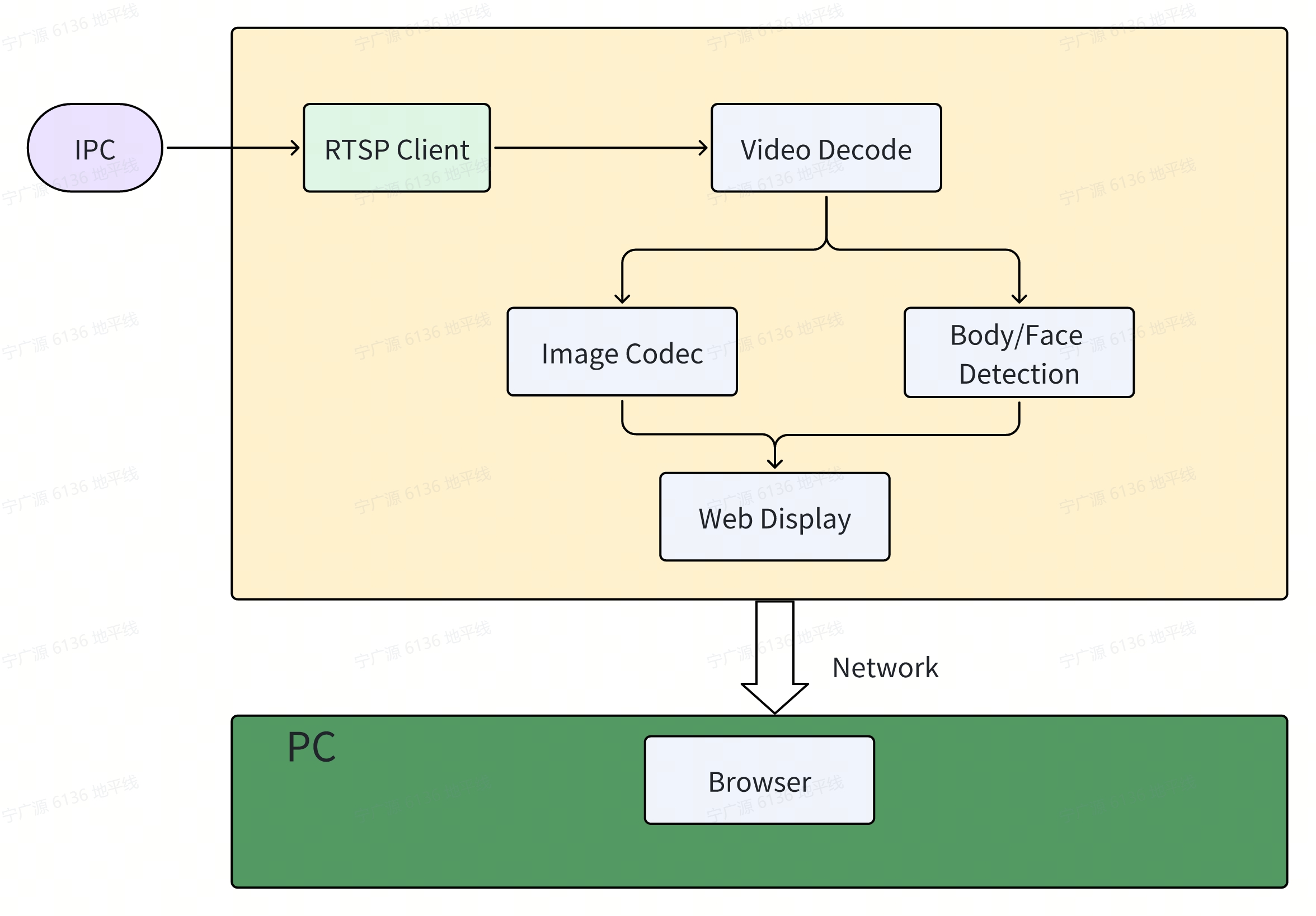
In actual customer applications, the display portion is completed by the customer's business system. The main functions of the Smart Box — RTSP video stream, video decoding, and human/face detection — publish intelligent results and images to the customer's business system. The workflow is shown below:

Code repository: (https://github.com/D-Robotics/hobot_rtsp_client.git)
Supported Platforms
| Platform | Runtime Environment |
|---|---|
| RDK X3, RDK X3 Module | Ubuntu 22.04 (Humble) |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) |
| RDK S600 | Ubuntu 24.04 (Jazzy) |
Preparation
-
The RDK has been flashed with the RDK OS system image.
-
Install TogetheROS.Bot following apt installation and upgrade.
-
Prepare an IPC device that supports RTSP protocol for H264/H265 stream transmission, and configure an IP address on the same network segment.
-
A PC on the same network as the RDK (wired or on the same Wi-Fi, with the first three octets of the IP address [192.168.1.x] matching).
-
Configure the system to performance mode
sudo bash -c "echo performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor"
- When starting multiple channels, configure ion_size to 1G. Refer to srpi-config configuration
Usage
Multi-Channel Startup Method
channel 1 (Terminal 1):
- Foxy
- Humble
- Jazzy
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置tros.b环境
source /opt/tros/jazzy/setup.bash
# 设置不同的域
export ROS_DOMAIN_ID=101
# 从TogetheROS的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/dnn_node_example/config/ .
# 启动launch文件
ros2 launch hobot_rtsp_client hobot_rtsp_client_ai_websocket_plugin.launch.py hobot_rtsp_url_num:=1 hobot_rtsp_url_0:='rtsp://admin:admin123@10.112.148.57:554/0' hobot_transport_0:='udp' websocket_channel:=0
channel 2 (Terminal 2):
- Foxy
- Humble
- Jazzy
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置tros.b环境
source /opt/tros/jazzy/setup.bash
# 设置不同的域
export ROS_DOMAIN_ID=102
# 从TogetheROS的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/dnn_node_example/config/ .
# 启动launch文件
ros2 launch hobot_rtsp_client hobot_rtsp_client_ai_websocket_plugin.launch.py hobot_rtsp_url_num:=1 hobot_rtsp_url_0:='rtsp://admin:admin123@10.112.148.58:554/0' hobot_transport_0:='udp' websocket_channel:=1
...
Note
- Set different ROS_DOMAIN_ID and websocket_channel for each channel.
- The above demonstrates the method for 2 channels. Start other channels 3~8 using the same approach.
- Launch scripts with "_plugin" start in component mode; e.g., hobot_rtsp_client_ai_websocket_plugin.launch.py and hobot_rtsp_client_ai_plugin.launch.py
- Launch scripts with "_websocket" enable web browsing; e.g., hobot_rtsp_client_ai_websocket_plugin.launch.py and hobot_rtsp_client_ai_websocket.launch.py
- To increase connection channel capacity, frame rate reduction for multiple video streams is required. Configure the frame rate from the IPC.
Algorithm Model Switching
The default algorithm in the launch script uses yolov8;
Refer to hobot_rtsp_client_ai_websocket_plugin.launch.py
ComposableNode(
package='dnn_node_example',
plugin='DnnExampleNode',
name='dnn_example',
parameters=[
{"config_file": 'config/yolov8workconfig.json'},
{"dump_render_img": 0},
{"feed_type": 1},
{"is_shared_mem_sub": 0},
{"msg_pub_topic_name": "/hobot_dnn_detection"}
],
extra_arguments=[{'use_intra_process_comms': True}],
)
To use the yolov5 algorithm, change config_file to "config/yolov5xworkconfig.json". Refer to YOLO,
Result Analysis
The RDK terminal outputs the following information:
[hobot_codec_republish-2] [WARN] [1732169402.355433988] [hobot_codec_decoder]: Sub imgRaw fps = -1774563328
[hobot_codec_republish-2] [WARN] [1732169402.906547961] [hobot_codec_decoder]: sub h264 1920x1080, fps: 24.7706, pub nv12, fps: 9.17431, comm delay [-8.8148]ms, codec delay [171.2000]ms
[dnn_node_example-4] [WARN] [1732169402.906916796] [mono2d_body_det]: SharedMemImgProcess Recved img encoding: nv12, h: 1080, w: 1920, step: 1920, index: 2508, stamp: 1732169402_735947000, data size: 3133440, comm delay [170.9541]ms
[hobot_codec_republish-3] [WARN] [1732169403.274412126] [hobot_codec_encoder]: sub nv12 1920x1088, fps: 10.8055, pub jpeg, fps: 10.8055, comm delay [164.9091]ms, codec delay [7.6364]ms
[dnn_node_example-4] [WARN] [1732169403.321086039] [mono2d_body_det]: input fps: 10.81, out fps: 10.81, infer time ms: 92, post process time ms: 10
[hobot_codec_republish-2] [WARN] [1732169403.946849482] [hobot_codec_decoder]: sub h264 1920x1080, fps: 25, pub nv12, fps: 10.5769, comm delay [-7.0000]ms, codec delay [168.2727]ms
Open another terminal and use the ros2 topic list command to query RDK topic information:
$ export ROS_DOMAIN_ID=101
$ ros2 topic list
/hobot_dnn_detection
/image_decode
/image_mjpeg
/parameter_events
/rosout
/rtsp_image_ch_0
/rtsp_image_ch_0 is the video published by the RDK after obtaining IPC video via RTSP. /hobot_dnn_detection
is the algorithm message published by the RDK containing human detection results. /image_decode is the NV12 image decoded by the RDK after receiving H264. /image_mjpeg is the JPEG image encoded by the RDK.
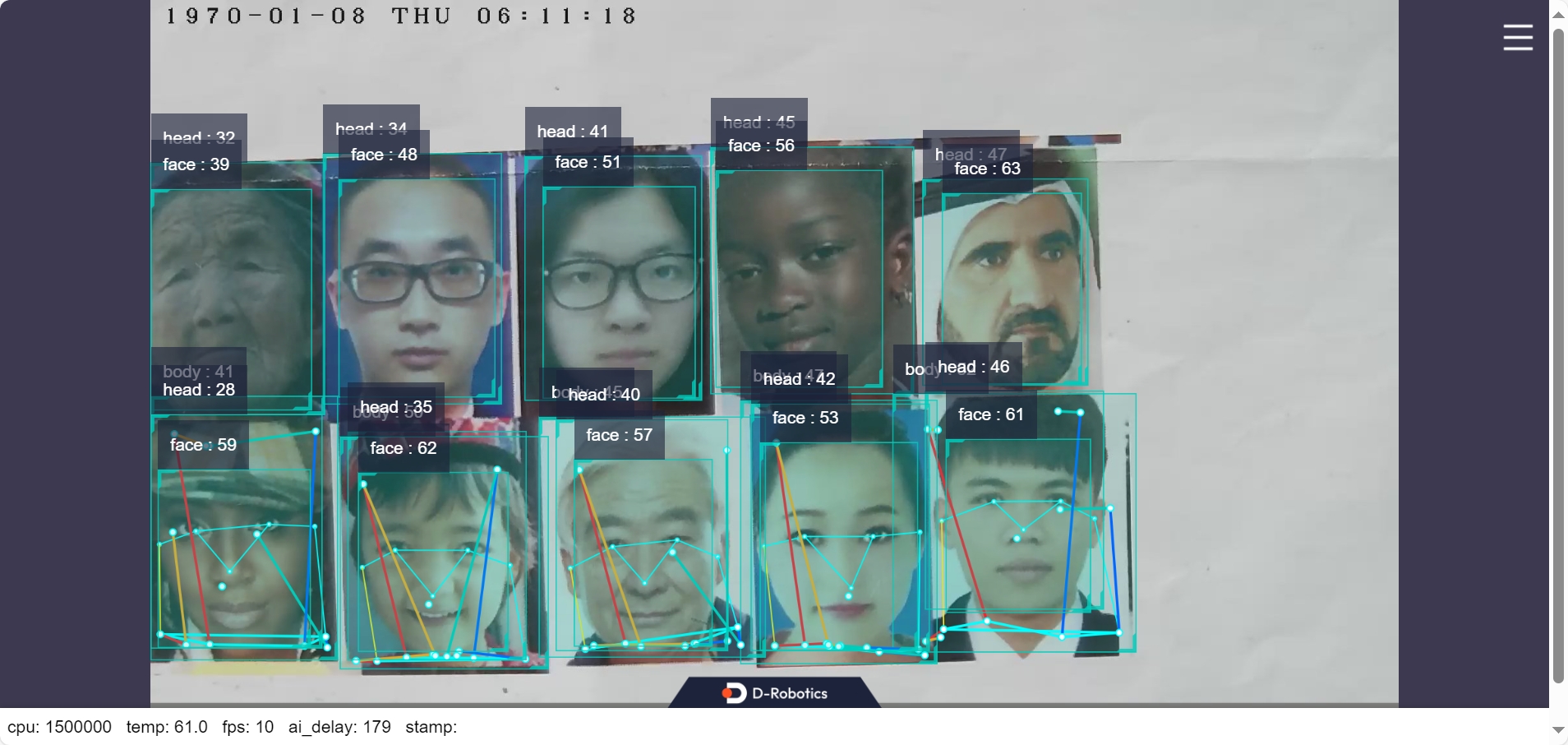
Enter http://IP:8000 in a PC browser for split-screen configuration

Human and face detection boxes, keypoints, and pose detection results are rendered on the web (IP is the RDK's IP address):