7.5.2 MCU 快速入门指南
范围
本章节概述了 MCU 系统,旨在帮助读者快速了解并掌握相关内容,以便开展 MCU1 的开发工作。因为 MCU0负责启动 Acore、MCU1以及电源管理等功能,这部分不建议客户自行修改,默认不释放源码,提供地瓜验证过的 bin 文件。�章节中仅对可能与 MCU1 发生冲突的部分进行简要说明,旨在帮助用户在开发过程中规避 MCU0 与 MCU1 之间的资源竞争问题。
基础信息
- MCU 编译工具链为 GCC 工具链,版本为 gcc-arm-none-eabi-10.3~2021.10
- MCU 核为 ARM R52+,可以用 ARM R52 technical reference manual 文档作为参考:官网链接
- MCU 运行的操作系统均为 FreeRTOS,版本为 FreeRTOS Kernel V10.0.1
- MCU 主要分为两部分:MCU0和 MCU1。MCU0主要负责启动 Acore、MCU1以及电源管理等功能,目前不开源;MCU1主要负责跑业务等功能,开源,客户可根据自己需求进行修改
MCU 框架
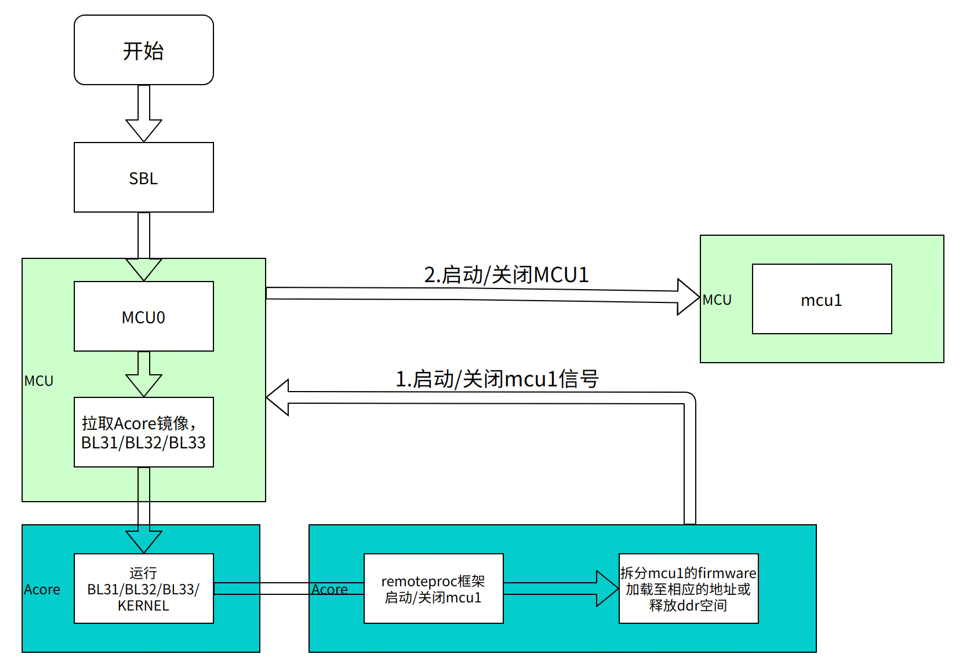
MCU0是板子启动的开始,也是重中之重。因为 MCU0负责启动 Acore、MCU1以及电源管理等功能。Acore 所运行的 linux 操作系统是客户开发功能的重要载体,而 MCU1运行的 FreeRTOS 操作系统为客户的实时任务进行保驾护航。 MCU1通过 linux 的 remoteproc 框架实现,在 Acore 的 sysfs 通过向 MCU0发送通知,从而控制 MCU1的启动和关闭。同时在 RDK-S100的休眠模式下,也是通知 Acore 通知 MCU0从而操作 MCU1,实现低功耗休眠功能。
MCU0是板子启动的开始,也是重中之重。因为 MCU0负责启动 Acore、MCU1以及电源管理等功能。Acore 所运行的 linux 操作系统是客户开发功能的重要载体,而 MCU1运行的 FreeRTOS 操作系统为客户的实时任务进行保驾护航。 MCU1通过 linux 的 remoteproc 框架实现,在 Acore 的 sysfs 通过向 MCU0发送通知,从而控制 MCU1的启动和关闭。同时在 RDK-S600的休眠模式下,也是通知 Acore 通知 MCU0从而操作 MCU1,实现低功耗休眠功能。
开发环境
交叉编译是指在主机上开发和构建软件,然后把构建的软件部署到开发板上运行。主机一般拥有比开发板更高的性能和更多的内存,可以高效完成代码的构建,可以安装更多的开发工具。
主机编译环境要求
推荐使用 Ubuntu 22.04 操作系统,保持和 RDK S100相同的系统版本,减少因版本差异产生的依赖问题。
Ubuntu 22.04 系统安装以下软件包:
sudo apt-get install -y build-essential make cmake libpcre3 libpcre3-dev bc bison \
flex python3-numpy mtd-utils zlib1g-dev debootstrap \
libdata-hexdumper-perl libncurses5-dev zip qemu-user-static \
curl repo git liblz4-tool apt-cacher-ng libssl-dev checkpolicy autoconf \
android-sdk-libsparse-utils mtools parted dosfstools udev rsync python3-pip scons
pip install "scons>=4.0.0"
pip install ecdsa
pip install tqdm
编译 MCU 系统
- 编译会使用 python3,RDK S100开发使用的 python3的版本为3.8.10;
- MCU1的镜像分为 debug 和 release 两个版本。debug 版本的镜像会有调试信息,而 release 版本不含调试信息。
首次编译会从 arm 官网下载工具链后解压缩(10min 左右),网速不好可能会导致工具链下载不成功或下载不完整的问题,建议通过以下方式下载编译工具链:
-
点击工具链下载链接,下载编译工具链。
-
将已有工具链移至 /Build/ToolChain/Gcc/ 内,移动工具链命令如下:
mv 工具链存储路径/工具链文件名 新代码/Build/ToolChain/Gcc/ -
编译时检测到有工具链,不会再从官网下载。
# 编译MCU1 Debug版本
cd mcu/Build/FreeRtos_mcu1
python build_freertos.py lite matrix B s100 mcu1 gcc debug
*/
# 编译MCU1 Release版本
cd mcu/Build/FreeRtos_mcu1
python build_freertos.py lite matrix B s100 mcu1 gcc release
# 编译MCU1 Debug版本
cd mcu/Build/FreeRtos_mcu1
python build_freertos.py lite matrix B s600 gcc mcu1 debug
# 编译MCU1 Release版本
cd mcu/Build/FreeRtos_mcu1
python build_freertos.py lite matrix B s600 gcc mcu1 release
编译成功标志


编译输出目录
output/
├── debug # 该文件夹下包含debug版本的编译生成文件
| ├── objs # 编译生成的i/s/o文件
| └── S100_MCU_SIP_V2.0 # 编译生成的bin/map/elf等文件
| ├── custom_compiler_flags.py
| ├── S100_MCU_DEBUG.elf # MCU1启动文件
| ├── S100_MCU_DEBUG.map
| ├── S100_MCU_SIP_V2.0.bin
├── objs # 编译生成的i/s/o文件,根据编译的版本变化
├── release # 该文件夹下包含release版本的编译生成文件
| ├── objs # 编译生成的i/s/o文件
| └── S100_MCU_SIP_V2.0 # 编译生成的bin/map/elf等文件
output/
├── debug # 该文件夹下包含debug版本的编译生成文件
| ├── objs # 编译生成的i/s/o文件
| └── S600_MCU_Matrix_V2.0 # 编译生成的bin/map/elf等文件
| ├── S600_MCU_RAW.bin
| ├── S600_MCU_DEBUG.elf # MCU1启动文件
| ├── S600_MCU_DEBUG.map
| ├── S600_MCU_Matrix_V2.0.bin
├── objs # 编译生成的i/s/o文件,根据编译的版本变化
├── release # 该文件夹下包含release版本的编译生成文件
| ├── objs # 编译生成的i/s/o文件
| └── S600_MCU_Matrix_V2.0 # 编译生成的bin/map/elf等文件
MCU1启动/关闭流程
MCU1的启动/关闭是由 Acore 经过 remoteproc 框架传递信息给 MCU0进而实现启动/关闭 MCU1。
MCU1启动原理与步骤
MCU1启动原理
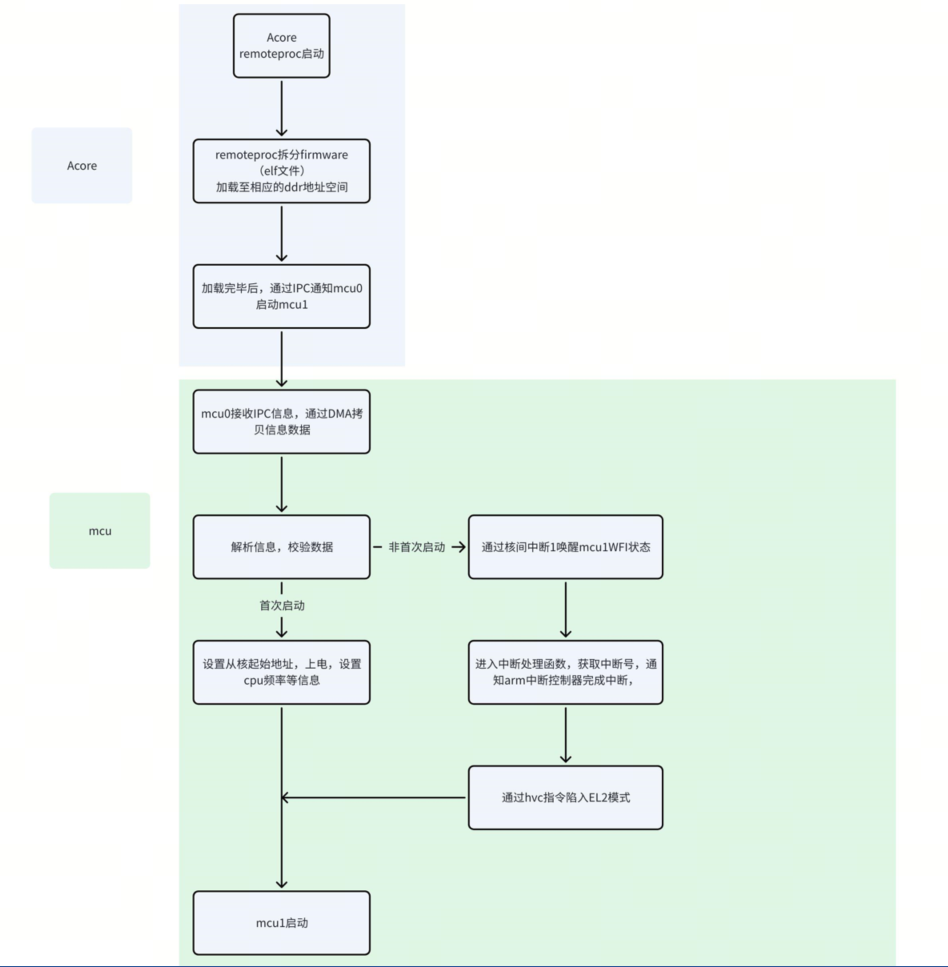
MCU1启动步骤
下述启动流程以 debug 版本为例,release 版本与其类似,只是少一些 log 打印。
- 经过上述编译流程,编译 debug 版本会在 S100_MCU_SIP_V2.0文件夹下产生 S100_MCU_DEBUG.elf 文件(release 版本类似),该文件为 MCU1的 firmware 文件,因此需要将该文件推送到板端的/lib/firmware 目录。
- 经过上述编译流程,编译 debug 版本会在 S600_MCU_Matrix_V2.0文件夹下产生 S600_MCU_DEBUG.elf 文件(release 版本类似),该文件为 MCU1的 firmware 文件,因此需要将该文件推送�到板端的/lib/firmware 目录。
举例子如下:(此处以及后续步骤截图均以 S100为例,S600类似)

- 板端启动流程
cd /sys/class/remoteproc/remoteproc_mcu0
echo S100_MCU_DEBUG.elf > firmware
echo start > state
正常启动后,串口 log 打印下图所示 Acore 侧串口打印

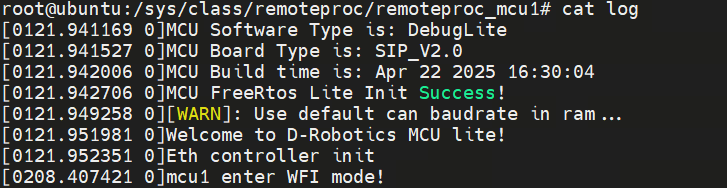
MCU 侧串口打印

MCU1关闭原理与步骤
MCU1关闭原理
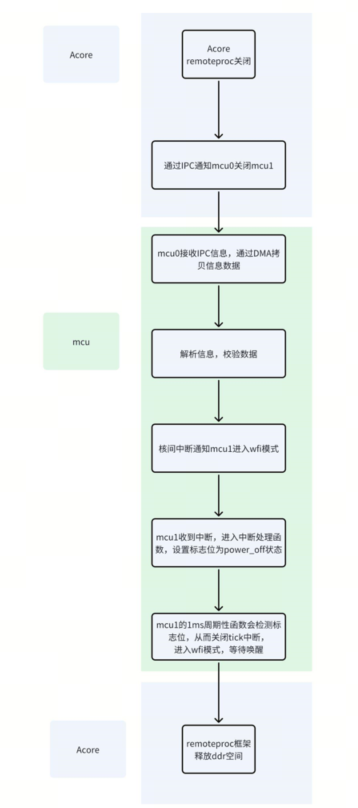
MCU1关闭步骤
下述关闭流程以 debug 版本为例,release 版本与其类似,只是少一些 log 打印。 (后续实例以 S100为例,S600类似)
cd /sys/class/remoteproc/remoteproc_mcu0
echo S100_MCU_DEBUG.elf > firmware
echo stop > state
cd /sys/class/remoteproc/remoteproc_mcu0
echo S600_MCU_DEBUG.elf > firmware
echo stop > state
正常关闭后,串口 log 打印下图所示 Acore 侧串口打印

MCU 侧串口打印

stop MCU1之后,如果需要再次启动 MCU1,必须等待系统进入 wfi 模式之后,才能再次 start MCU1,见下图所示。原因解释:避免系统还没有进入 wfi 模式时,start MCU1会重新加载 firmware 至 mcu sram 位置导致之前位置代码被覆盖,导致系统运行跑飞挂死
MCU0/MCU1模块划分
MCU 整个系统含有 ICU、RTC、IPC、port、CAN 等模块,但是为了用户开发的方便,对于功能进行了划分,划分细节如下图所示。
| 模块 | 模块位置 |
|---|---|
| ppslcu | MCU0 |
| port | MCU0 |
| uart | MCU0/MCU1 |
| log | MCU0/MCU1 |
| shell_init | MCU0/MCU1 |
| mDma | MCU0/MCU1 |
| I2c | MCU0: i2c6, i2c7/MCU1: i2c8, i2c9 |
| tca9539 | MCU0 |
| ICU | MCU0 |
| GPT | MCU0 |
| pmic | MCU0 |
| fls_init | MCU0 |
| otaflash | MCU0 |
| ipc | MCU0: instance8/MCU1: instance0(其他 instance 未划分, 均可使用) |
| crypto | MCU0 |
| pvt | MCU0 |
| canGW | MCU1 |
| Rtc | MCU0 |
| RTC_pps | MCU0 |
| Eth_Init | MCU1 |
| Scmi | MCU0 |
| 模块 | 模块位置 |
|---|---|
| ppslcu | MCU0 |
| port | MCU0 |
| uart | MCU0/MCU1 |
| log | MCU0/MCU1 |
| shell_init | MCU0/MCU1 |
| mDma | MCU0/MCU1 |
| I2c | MCU0/MCU1 |
| tca9539 | MCU0 |
| ICU | MCU0 |
| GPT | MCU0 |
| pmic | MCU0 |
| fls_init | MCU0 |
| otaflash | MCU0 |
| ipc | MCU0: instance8/MCU1: instance0 |
| crypto | MCU0 |
| pvt | MCU0 |
| Rtc | MCU0 |
| RTC_pps | MCU0 |
| Eth_Init | MCU1 |
| Scmi | MCU0 |
| Can | MCU1:Can1, Can2, Can3, Can4, Can10 |
MCU 在 sysfs 上 debug 功能介绍
MCU 目前在 sysfs 上支持查看系统状态 alive,系统存活时间 taskcounter,mcu 版本 mcu_version,sbl 版本 sbl_version 等功能。
- 系统状态 alive:表示 MCU0/MCU1所处状态,分别为 alive 和 dead 两种。mcu alive 状态每1s 更新一次,所以获取状态会有1s 延迟;
- 系统存活时间 taskcounter:表示 mcu 启动后持续的时间,单位:秒;
- mcu 版本 mcu_version:可以查看 mcu 版本信息,包括 debug 版本还是 release 版本,以及编译的时间;
- sbl 版本 sbl_version:可以查看 sbl 版本信息以及编译的时间,但是只有在 remoteproc_mcu0下可以查看;
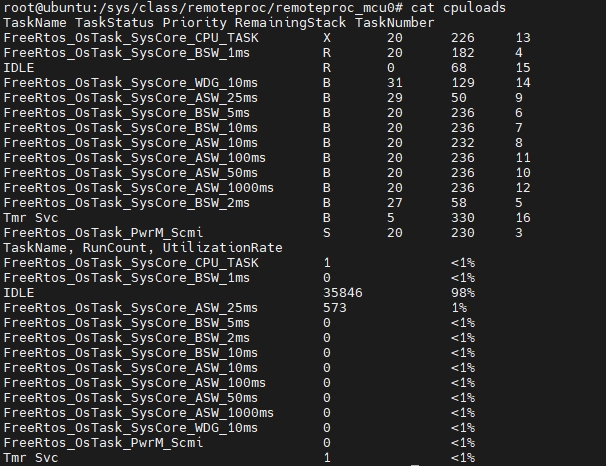
- mcu cpuloads: 可以获取到 MCU0/MCU1各任务的任务状态,优先级,剩余栈,运行次数(FreeRtos tickcount)和使用率等信息,帮助用户去 debug。cpuloads 数据获取需要1s 的延迟,因为会涉及到大量数据拷贝至 sysfs 文件系统下的输出 buffer。cpuloads 的获取需要在 MCU0/MCU1已上电的情况下才能进行获取。
- 固件名 firmware:该固件名为 remoteproc 框架下 mcu0启动 mcu1时的,mcu1的固件名字。当 mcu0启动 mcu1时,linux 会去板端/lib/firmware 文件夹下,找相应文件,从而加载至相应位置。
- 节点名 name:如 mcu0,为 soc:remoteproc_mcu0;mcu1,为 soc:remoteproc_mcu1。
- 状态 state:指 remoteproc 子系统的状态。启动 mcu1,经过是 mcu0 remoteproc 节点,所以会变为 runing 状态。未启动 mcu1时,状态为 offline。
- recovery 节点:指当 mcu 挂掉后,是否可�以获取 coredump 寄存器信息。该功能正常情况下是使能的,如果用到该功能,请参考MCU ramdump章节章节。
- uevent 节点:指设备类型,为 DEVTYPE=remoteproc。
- timesync 节点:主从设备同步时间需要,MCU 不支持该功能。
- 系统状态 alive,图示:

- 系统存活时间 taskcounter,图示:

- mcu 版本 mcu_version,图示:

- sbl 版本 sbl_version,图示:

- mcu 串口 log 获取,图示:
- mcu cpuloads 获取,图示:
MCU 串口使用
如果 RDK-S100含有连接方式如下,mcu 串口和 Acore 串口共用一个串口,自行查看:设备管理器 -> 端口 -> MCU-COM -> 波特率921600
如果 RDK-S600含有连接方式如下,mcu 串口和 Acore 串口共用一个串口,自行查看:设备管理器 -> 端口 -> MCU-COM -> 波特率921600


MCU0烧录流程
手动烧录
非空板烧录
- 打开板子,板端 Acore 串口常按 enter 进入 uboot(一定要一直按)
fastboot 0
- 编译好的 MCU0 镜像/output_sysmcu/目录下找到相应的 MCU0镜像(MCU0代码仅在商业版中提供),这里展示以 S100 MCU0为例。
fastboot oem interface:mtd
/* 编译出来的S100 MCU0镜像:MCU_S100_SIP_V2.0.img */
/* 编译出来的S600 MCU0镜像:MCU_S600_Matrix_V2.0.img*/
fastboot flash MCU_a "xxx/MCU_S100_SIP_V2.0.img"
fastboot flash MCU_b "xxx/MCU_S100_SIP_V2.0.img"
空板烧录
空板烧录请使用 Xburn 工具指定区域烧录,并指定 miniboot_flash
关于 Xburn 工具烧录指定区域,请参考指定区域烧录章节
关于 Xburn 工具烧录指定区域,请参考指定区域烧录章节
MCU1 Undefined/Abort 异常处理原理
正常情况下系统在进入 undefined/abort 异常时,最终会��进入死循环状态。只有重新执行上下电流程才能再次正常运行。RDK-S100由于不能对 MCU1单独进行上下电,所以需要进行系统流程的修改,以实现上述的预期。
正常情况下系统在进入 undefined/abort 异常时,最终会进入死循环状态。只有重新执行上下电流程才能再次正常运行。RDK-S600由于不能对 MCU1单独进行上下电,所以需要进行系统流程的修改,以实现上述的预期。
具体原理:当 Undefined/Abort 异常产生时,也会最终进入死循环状态。通过 Acore 的 sysfs 对 MCU1进行软件下电,也即通知 MCU1进入 wfi 模式,等下次再次 start 时,MCU1将重新软件启动,从而实现预期。
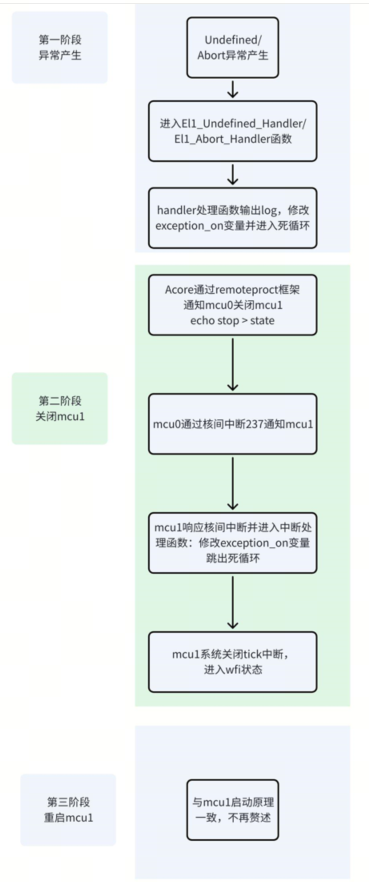
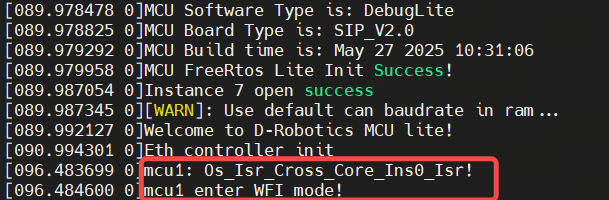
下面以 S100 Undefined 异常为例子,S600类似(只是相关函数名称前缀为 S600)。当 Undefined 异常产生时,uart 串口输出 log “EL1_Undefined_Handler”,并进入最终进入 S100_Exception_Handler 处理函数,并根据 exception_on 变量进入死循环状态。当 Acore 通过 remoteproc 框架 stop MCU1后,核间中断修改 exception_on 变量,进而关闭 tick 周期性中断,并进入 WFI 模式(STANDBY 模式):
void Os_Isr_Cross_Core_Ins0_Isr(void)
{
LogSync("mcu1 enter WFI mode!\r\n");
power_on = 0;
ClearCrossCoreISR0();
if (exception_on)
{
exception_on = 0;
}
}
void S100_Exception_Handler(void)
{
LogSync("os enter %s!\r\n", __func__);
while (exception_on){};
LogSync("%s enter wfi mode!\r\n", __func__);
Os_Disable_Millisecond();
Os_Clear_Millisecond();
STANDBY();
};
void EL1_Undefined_Handler(void)
{
int32_t func_ptr;
*(volatile unsigned int *)(UART_0_BASE) = ('E');
*(volatile unsigned int *)(UART_0_BASE) = ('L');
*(volatile unsigned int *)(UART_0_BASE) = ('1');
*(volatile unsigned int *)(UART_0_BASE) = ('_');
*(volatile unsigned int *)(UART_0_BASE) = ('U');
*(volatile unsigned int *)(UART_0_BASE) = ('n');
*(volatile unsigned int *)(UART_0_BASE) = ('d');
*(volatile unsigned int *)(UART_0_BASE) = ('e');
*(volatile unsigned int *)(UART_0_BASE) = ('f');
*(volatile unsigned int *)(UART_0_BASE) = ('i');
*(volatile unsigned int *)(UART_0_BASE) = ('n');
*(volatile unsigned int *)(UART_0_BASE) = ('e');
*(volatile unsigned int *)(UART_0_BASE) = ('d');
*(volatile unsigned int *)(UART_0_BASE) = ('_');
*(volatile unsigned int *)(UART_0_BASE) = ('H');
*(volatile unsigned int *)(UART_0_BASE) = ('a');
*(volatile unsigned int *)(UART_0_BASE) = ('n');
*(volatile unsigned int *)(UART_0_BASE) = ('d');
*(volatile unsigned int *)(UART_0_BASE) = ('l');
*(volatile unsigned int *)(UART_0_BASE) = ('e');
*(volatile unsigned int *)(UART_0_BASE) = ('r');
*(volatile unsigned int *)(UART_0_BASE) = ('\r');
*(volatile unsigned int *)(UART_0_BASE) = ('\n');
LogSync("os enter %s!\r\n", __func__);
exception_on = 1;
func_ptr = &S100_Exception_Handler;
__asm volatile (
"mov lr, %[func_ptr]\t"
:
: [func_ptr] "r" ((uintptr_t)func_ptr)
: "lr"
);
__asm volatile ("ERET");
}
MCU1 main 函数简介
main 函数是进入系统后的关键代码,下述代码也是 MCU1正常启动的关键,请勿随意删除相关代码,删除可能会导致启动异常。
int main(void)
{
Ipc_MainPowerUp = TRUE; /* IPC 上电标志,MCU1默认上电,因为在MCU0已上电 */
PpsIcu_Irq_Init(); /* PPS相关中断配置为边沿触发函数 */
Uart_Init(); /* UART串口初始化,debug用 */
Log_Init(); /* log串口初始化,初始化后可在Acore获取相应mcu log信息 */
#ifdef SHELL_ENABLE
Shell_Init(); /* shell命令初始化,通过SHELL_ENABLE宏进行开关 */
#endif
Version_into_AonSram(); /* 获取mcu版本信息,初始化后可在Acore获取相应mcu version信息 */
LogSync("MCU FreeRtos Lite Init Success!\r\n");
FreeRtos_Irq_Init(); /* FreeRtos 中断初始化 */
FreeRtos_Task_Init(); /* FreeRtos 任务初始化以及调度启动 */
for(;;){};
}
int main(void)
{
unsigned long core_id = GetCurrentCoreID(); /* 获取当前cluster工作的core id */
if (core_id == 0) { /* core0执行逻辑 */
Ipc_MainPowerUp = TRUE; /* IPC 上电标志,MCU1默认上电,因为在MCU0已上电 */
Disable_AonTimer(); /* 关闭aon的timer */
Can2Atcm_Init(); /* 搬运Can相关数据代码到Atcm上 */
PpsIcu_Irq_Init(); /* PPS相关中断配置为边沿触发函数 */
Uart_Init(); /* UART串口初始化,debug用 */
Log_Init(); /* log串口初始化,初始化后可在Acore获取相应mcu log信息 */
#if (SHELL_ENABLE)
Shell_Init(); /* shell命令初始化,通过SHELL_ENABLE宏进行开关 */
#endif
Version_into_AonSram(); /* 获取mcu版本信息,初始化后可在Acore获取相应mcu version信息 */
LogSync("MCU1 FreeRtos Lite Init Success!\r\n");
uint32_t gicr1_waker_addr = 0x22120014; /* 只保留WAKER寄存器的 bit3 和 bit0,并写回清除其余控制位 */
uint32_t current_value, target_value;
current_value = *(volatile uint32_t *)(gicr1_waker_addr);
target_value = current_value & 0x9;
*(volatile uint32_t *)(gicr1_waker_addr) = target_value;
FreeRtos_Irq_Init(); /* FreeRtos 中断初始化 */
SetCanInterruptAffinity(1); /* 设置can中断亲和性,绑定到core1运行 */
SetIPCInterruptAffinity(1); /* 设置ipc中断亲和性,绑定到core1运行 */
FreeRtos_Task_Init(); /* FreeRtos 任务初始化以及调度启动 */
for(;;){};
} else if (core_id == 1) { /* core1执行逻辑 */
Os_Enable_Can1_DataIsr(); /* 使能Can1-10中断 */
Os_Enable_Can2_DataIsr();
Os_Enable_Can3_DataIsr();
Os_Enable_Can4_DataIsr();
Os_Enable_Can10_DataIsr();
__asm__ volatile("cpsie i"); /* 使能 IRQ 中断 */
__asm__ volatile("cpsie f"); /* 使能 FIQ 中断 */
while(1) {
__asm__ volatile("wfe"); /* 空闲时进入低功耗wfe状态 */
}
for(;;){};
}
}
MCU Log 简介
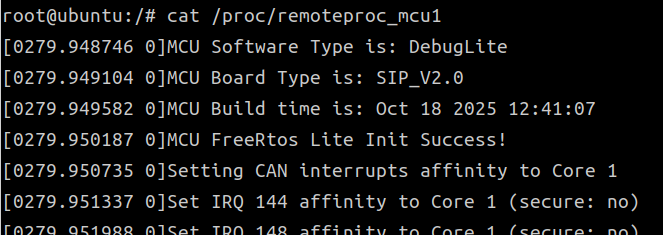
MCU 提供了基础的日志(Log)输出功能,主要用于调试与运行状态记录。当前版本的 Log 模块支持通过格式化字符串的方式输出信息,便于开发者在调试过程中快速定位问题和查看变量状态。在 Acore 侧可通过/proc/remoteproc_mcu0和/proc/remoteproc_mcu1这两个节点可以查看 MCU0和 MCU1的日志信息。
以获取 MCU1串口 log 信息为例,如下图所示:
目前,MCU Log 支持的格式化输出类型包括:
- %s —— 字符串
- %d —— 十进制有符号整数
- %u —— 十进制无符号整数
- %x —— 十六进制小写格式
- %X —— 十六进制大写格式
- %c —— 单个字符
除以上类型外的其他格式化输出暂不支持,后续版本将逐步扩展更多的数据类型与格式支持,以满足更丰富的调试需求。